









- ホーム
- 製品情報
- 慣性航法装置・モーションセンサー
- Navsight Marine INS シリーズ


Navsight Marine INS シリーズ
慣性航法式高精度測位動揺計測計


Navsight Marine INS
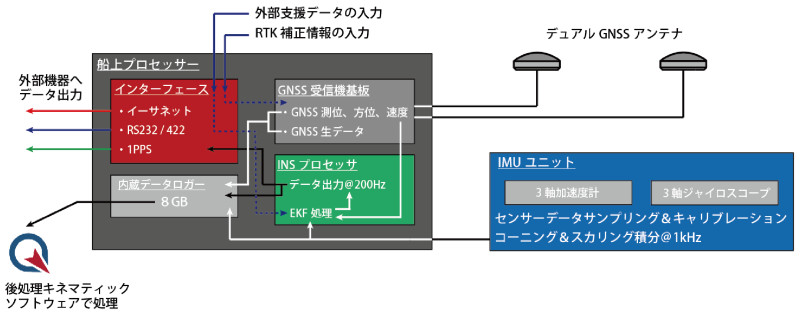
仏SBG Systems社製のNavsight Marine(ナブサイトマリンシリーズ)は、IMUユニット、GNSSアンテナ、高精度GNSS受信機を内蔵した船上プロセッサーユニットからなる同社のフラグシップINSプラットフォームで、精密水中地形測量用の測位・姿勢センサーの新たな業界スタンダードです。
IMUとGNSSの観測値を同社オリジナルの拡張カルマンフィルタで処理することで、マルチビーム測深器のオペレーションに必要な測位、船首、姿勢、時刻データを高精度に出力します。
特徴
- 深浅測量、マルチビーム測深に必要なデータを出力。
- 主要マルチビーム測量ソフトウェアにドライバ実装済み。
- 高精度後処理ヒーブデータの出力対応。
- GNSS測位が途切れても、慣性航法により位置・方位データを出力。
- NtripやCPトランスを用いてRTK測位可能※1。
- CLAS測位対応の内蔵GNSS受信機を選択可能
- 後処理によりパフォーマンスをさらに向上可能※2。
- 非INS仕様のMRUモデル有※3
- OEMモデル有※3。
※1:別途VRS事業者との契約が必要です。
※2:別途Qinertia Proソフトウェアの購入が必要です。
※3:詳細はお問い合わせください。
システム概要
システムの計測パフォーマンスを決定するIMUは、3つのグレードから選択することができます。ApogeeグレードとEkinoxグレードは、IP68の船上設置筐体のほかに、水中艤装が可能な200m耐圧筐体を選択することができます。

高精度GNSS受信機が内蔵される船上プロセッサー部は、一時艤装に適したIP68の防飛沫対応のラグドタイプと、永久艤装に適した1U高の19インチラックマウントモデルから選択することができます。
 |
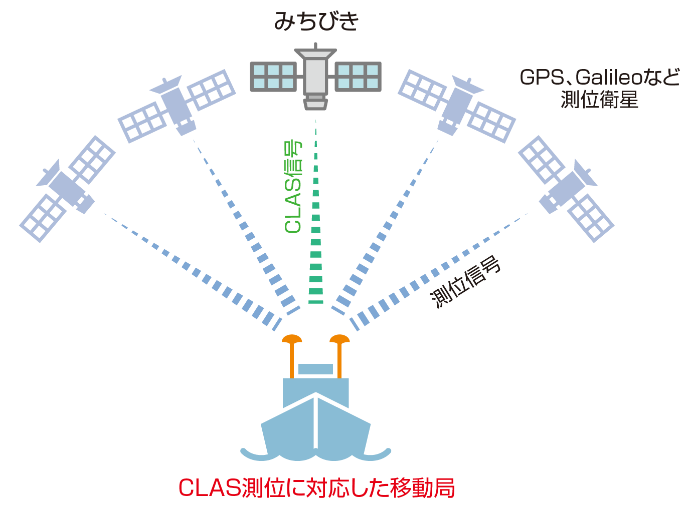
CLAS測位
|
内蔵するGNSS受信機に、みちびき(QZSS)からL6帯で配信される補強情報を用いたCLAS測位に対応するモデルを選択できるようになりました。 この方式では、セルラーなどの地上通信を必要としないため、遠隔地でもcmオーダーの高精度測位が可能となります。 ※CLAS測位はFugro Marinestar機能と排他仕様です。 |
 |
機器性能仕様
| HORIZON | APOGEE | EKINOX | |||
| 測位 | SBAS時 | 水平 | <1.0m | <1.0m | <1.2m |
| 鉛直 | <1.0m | <1.0m | <2.0m | ||
| RTK時 | 水平 | 0.01m+1ppm | 0.01m+1ppm | 0.01m+1ppm | |
| 鉛直 | 0.02m+1ppm | 0.02m+1ppm | 0.02m+1ppm | ||
| PPK時 | 水平 | 0.01m+1ppm | 0.01m+1ppm | 0.01m+1ppm | |
| 鉛直 | 0.02m+1ppm | 0.02m+1ppm | 0.02m+1ppm | ||
| GNSS欠測時 | 10秒後 | 水平: 0.1m 鉛直: 0.1m |
水平: 0.17m 鉛直: 0.1m |
水平: 0.5m 鉛直: 0.1m |
|
| PPK60秒後 | 水平: 0.1m 鉛直: 0.05m |
水平: 0.15m 鉛直: 0.05m |
水平: 1m 鉛直: 0.3m |
||
| ピッチ ロール |
SBAS時 | 0.007° | 0.01° | 0.02° | |
| RTK時 | 0.008° | 0.015° | |||
| PPK時 | 0.004° | 0.005° | 0.01° | ||
| GNSS欠測時 | 10秒後 | 0.007° | 0.008° | 0.02° | |
| PPK | 60秒後:0.005° | 60秒後:0.008° | 30秒後:0.04° | ||
| リアルタイムヒーブ | 5cmもしくは 最大値の5% |
5cmもしくは 最大値の5% |
5cmもしくは 最大値の5% |
||
| ディレイドヒーブ | 2cmもしくは 最大値の2% |
2cmもしくは 最大値の2% |
2cmもしくは 最大値の2% |
||
| 方位 | 2m基線長 |
0.01° |
0.02° | 0.03° | |
| 4m基線長 | 0.01° | 0.02° | |||
| PPK時 | 0.008° | 0.01° | 0.02° | ||
| GNSS欠測時 | 10秒後 | >2m: 0.01° | 2m: 0.03° 4m: 0.02° |
2m: 0.05° 4m: 0.04° |
|
| PPK | 60秒後:0.01° | 60秒後:0.025° | 30秒後:0.05° | ||
※:機器の計測性能は、海況、GNSS受信環境、船体への艤装状況等によって変わります。
※PPK:Post-Processed Kinematic(後処理キネマティック測位)
※:より詳細な機器性能は、製品カタログをご確認ください。
機器諸元
詳細な機器諸元は、製品カタログをご確認ください。
ソフトウェア
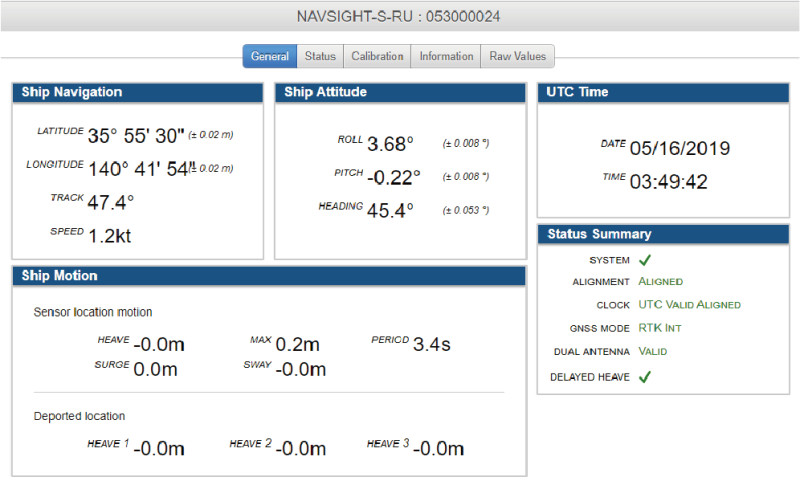
Web Interface
システムの設定やパラメータの監視には、ウェブブラウザからアクセスできる機器内のWeb Interfaceを使用します。シンプルなUIで直感的に操作することができるだけでなく、コンピュータにソフトウェアをインストールする必要がないため、ソフトウェアと機器ファームウェアの相性を一切気にする必要もありません。
|
|
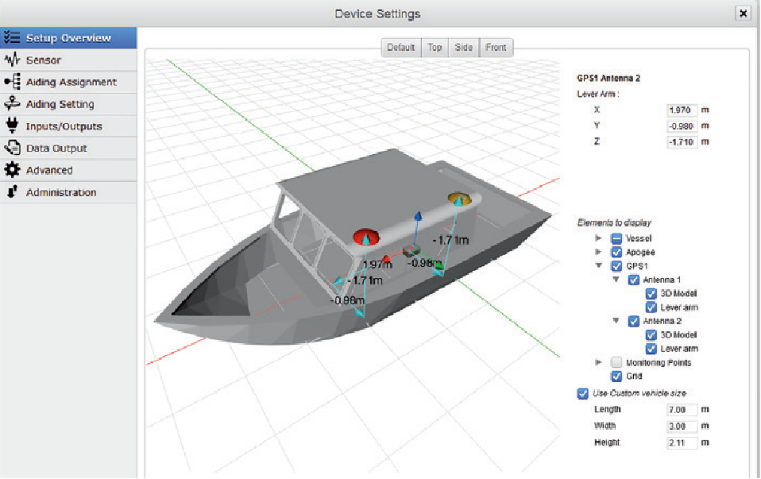 |
Ntripクライアント機能も備えているため、コンピュータをインターネットに接続するだけで、外部機器をNavsightに接続することなく手軽にRTK測位を行うことができます※。
※:別途Ntrip事業者との契約が必要です。
Qinertia Pro(オプション)
|
Qinertia ProはSBG Systems社が開発した、同社製 |
 |
オプション
OEMモデル
|
ハウジングが不要なインテグレーションの場合、OEM筐体モデルの取り扱いもございます。詳細はお問い合わせください。 |
 |
 |
カタログダウンロード
PDFファイルを閲覧するには専用ソフトが必要です。
ソフトをお持ちでない方は、バナーをクリックして最新のAdobe Reader(フリーソフト)をダウンロードしてください。


