










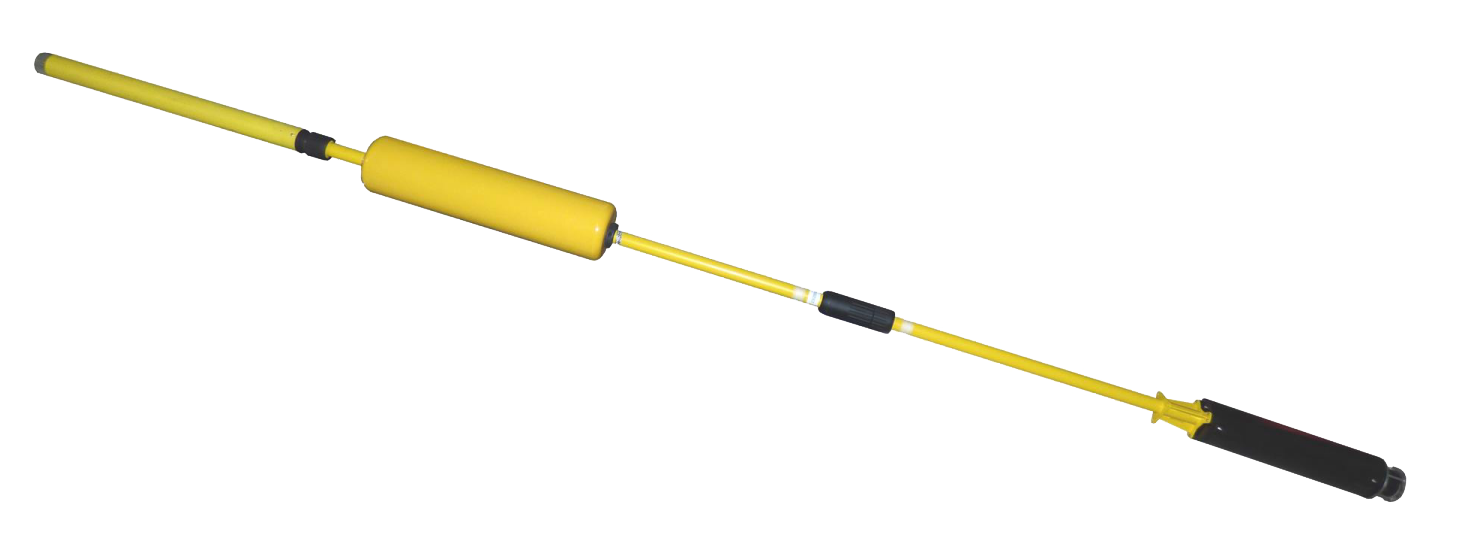
NemoSens
RTsys社製 多目的マイクロAUV


RTsys社製 多目的マイクロAUV NemoSens
NemoSensはRTsys社の海軍や研究所とのパートナーシップにより、科学や海洋工学、防衛の用途向けに開発されたコンパクトな自律航行型無人潜水機(AUV)です。ワンマンオペレーションが可能な小型・軽量な設計でありながら、サイドスキャンソナーや測深器、CTDセンサー、 HDカメラなど様々なオプション機器を搭載する拡張性を有しており、海底探査、環境調査、落下物の位置特定など幅広い用途にご利用いただけます。
アプリケーション
・洋上風力
・海底地形調査
・海底マッピング
・海洋環境調査
・石油ガス探査
・不発弾探査
 |
 |
 |
 |
 |
 |
NemoSens仕様
|
最大対応水深 |
300m |
||
|---|---|---|---|
|
連続稼働時間 |
10時間以上 |
||
|
全長※1 |
90cm |
||
|
筐体径 |
φ12cm |
||
|
重量※1 |
8.5kg |
||
|
最高航行速度 |
6ノット |
||
|
バッテリー容量 |
600Wh(充電器付属) |
||
※基本仕様はペイロードに依存します
※1:ペイロード構成による
標準ペイロード
・水中音響モデム
・INS(MEMS)
・DVL
・圧力センサー
・GNSS
・Wi-Fi
・UHF
オプションペイロード
ご使用用途に合わせて、サイドスキャンソナーに加えて最大2モジュール(2kg以下まで)まで搭載可能です。各種センサーの詳細はお問い合わせください。
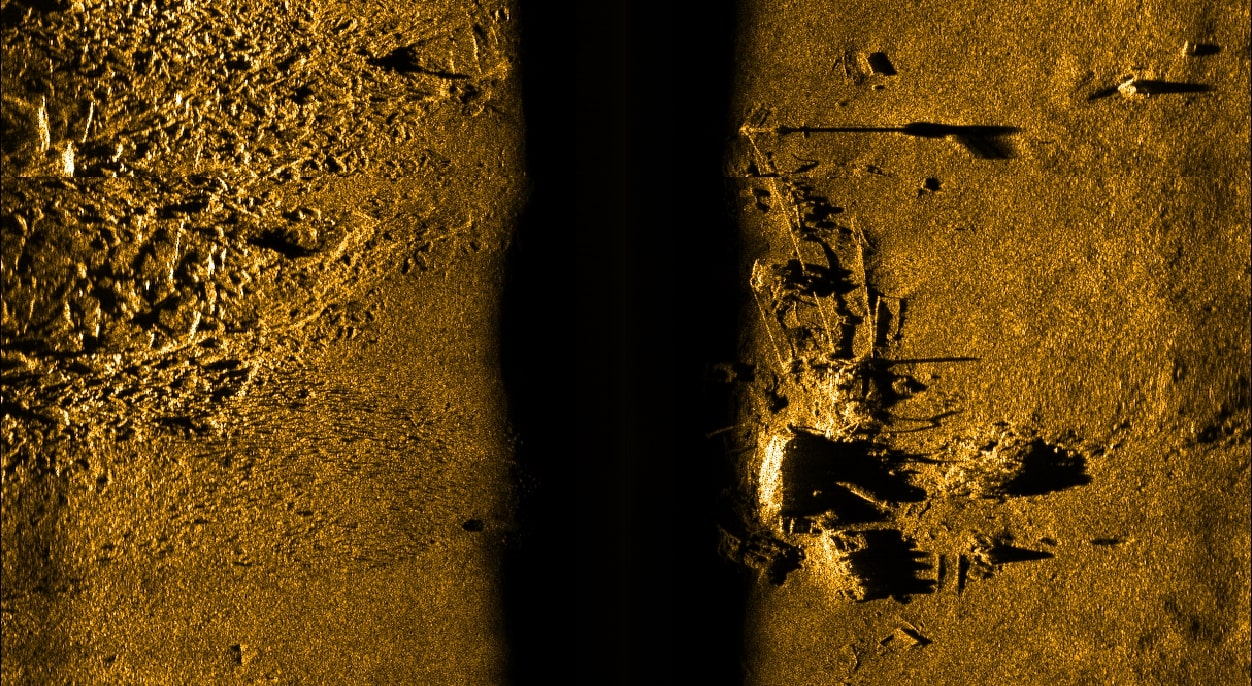
・サイドスキャンソナー
・ビデオカメラ+ライト(耐圧250m)
・CTDセンサー
・多項目水質計
・磁気センサー …etc.
搭載例
サイドスキャンソナー
|
|
 |

CTDセンサー搭載例
 |
アルチメーター
 |
磁気センサー搭載例
 |
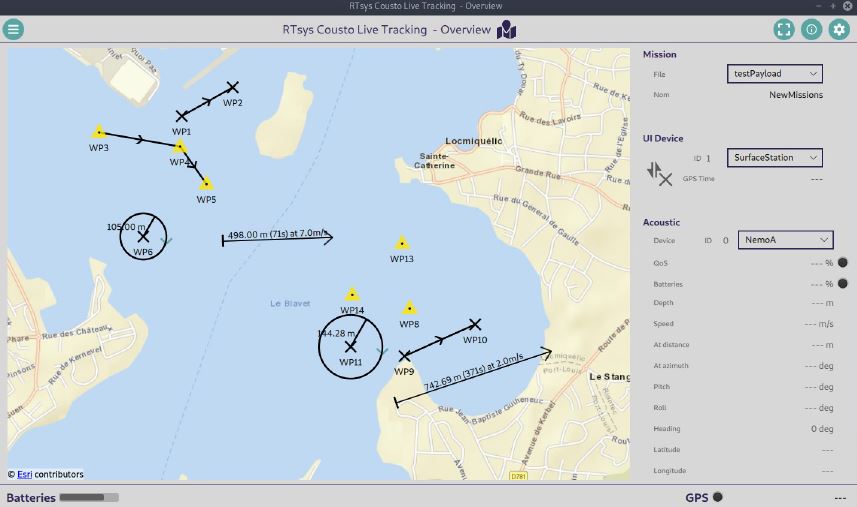
ソフトウェア 「Cousto」
・システム確認、設定
・キャリブレーション
・ミッション作成、アップロード
・リアルタイム監視
・データダウンロード
UHF受信機 「GEOSYS MKII」
UHF の電波を受信することで、Nemosensが浮上した事をサウンドで知らせ、ディスプレイに位置情報(緯度経度、距離、方角)を表示します。観測開始や終了などのコマンドを送信することも可能です。

オプション補助機器
リポジショニング用LBLブイ RSB-MKII
|
LBL(ロングベースライン)音響測位によるポジショニングを行うことにより、水中のNemoSensの位置精度を向上させます。LBLブイにはGPSと音響システムが搭載されており、設定されたネットワーク内で通信が可能です。係留およびドリフトのどちらのモードでも使用することができます。 |
 |
SCU「船上通信ユニット」
|
GPSとトランスデューサーを備えた小型通信ユニットです。パソコンに接続することによりシステムステータスのリアルタイム監視や水中音響装置との通信をサポートします。
|
|

機種搭載カメラシステム「デメニギス」
|
標準ヘッドパーツを換装することで装備可能な水中カメラシステムです。
水中重量が標準ヘッドパーツと同重量になるように設計されている為、着脱によるバラスト調整が必要ありません。
|
カタログダウンロード
PDFファイルを閲覧するには専用ソフトが必要です。
ソフトをお持ちでない方は、バナーをクリックして最新のAdobe Reader(フリーソフト)をダウンロードしてください。


